Research. |
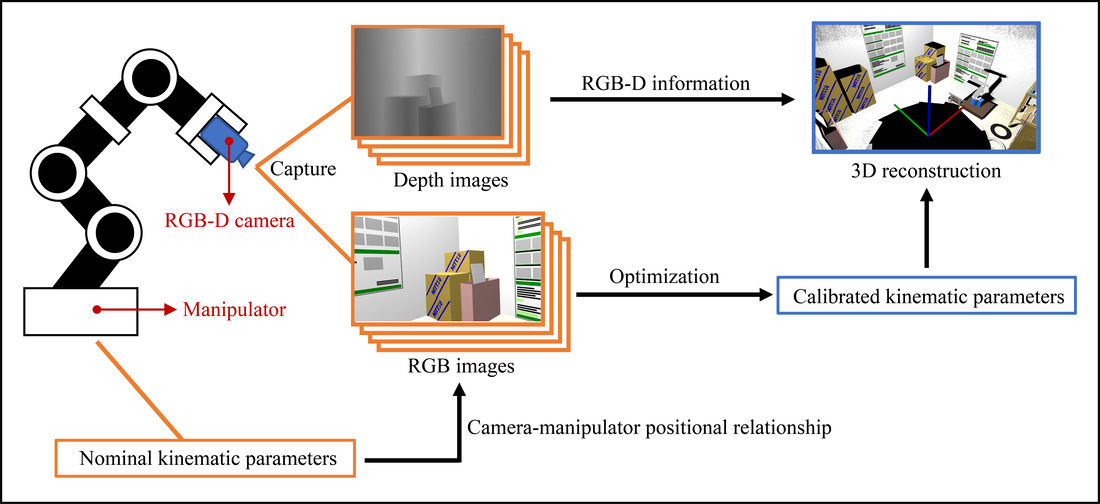
Gaphical abstract of SKCLAM
|
2018~2021:SLAM-integrated kinematic calibration (SKCLAM)
SLAM (Simultaneous Localization and Mapping) techniques can be applied to industrial manipulators for 3D mapping around them and calibration of their kinematic parameters. We call this “SKCLAM” (Simultaneous Kinematic Calibration, Localization and Mapping). Using an RGB-D camera attached to the end-effector of a manipulator, we demonstrated successful SKCLAM in a virtual environment and a real environment. |
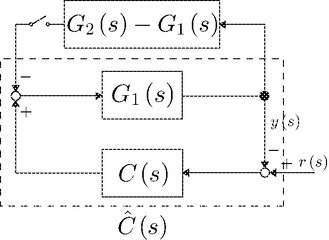
The relationship betweem simultaneously stabilizing control C(s) and the strongly stabilizing controller C^ (s)
|
2016〜2018:Simultaneously stabilizing controllers with robust servo characteristic
In this study, we proposed a design method for simultaneously stabilizing controllers having robust servo characteristic for the step signal. To solve this problem, we adopt the relationship between the simultaneous stabilization and the strong stabilization. Then this problem is reduced to the strongly stabilizing controllers with interpolation problem. Using this idea, we obtain the parameterization of all simultaneously stabilizing controllers with robust servo characteristic for the step signal. |
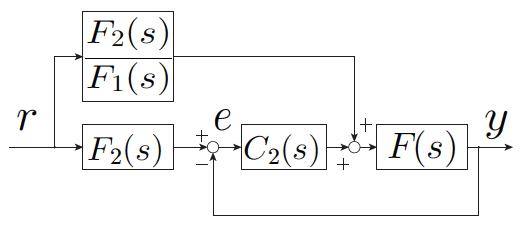
The double two-degree-of-freedom feedback control system
|
2015〜2016:Low sensitivity control for minimum-phase systems using double feedback control
Since the sum of the sensitivity function and the complementary function is equal to 1, we cannot obtain either low sensitivity or high robust stability characteristics, although low sensitivity does not always make the system unstable. We propose a design method of the double two-degree-of-freedom feedback control system. Formulate this system, then compare the influence for the output between the two-degree-of-freedom control system and the double two-degree-of-freedom control system. That confirms the proposed method is better than the previous study. |
